Examples¶
One complete, self-contained example for each algorithm in the library. Every
snippet runs as-is: it builds the input, runs the algorithm, inspects the
result, and draws it with the matching visualization helper. The # -> comments
show the actual output, and each example is followed by the figure it produces.
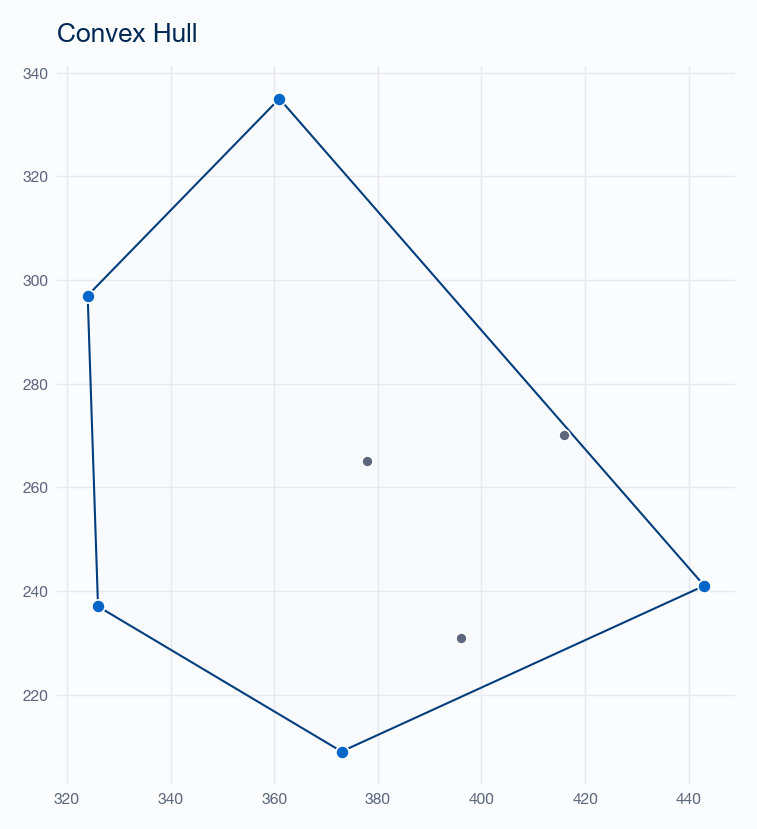
Convex hull¶
The smallest convex polygon enclosing a set of points (Gift Wrapping / Jarvis march).
from cgeom.algorithms import ConvexHull
from cgeom.visualization import plot_convex_hull
points = [(326, 237), (373, 209), (378, 265), (443, 241),
(396, 231), (416, 270), (361, 335), (324, 297)]
hull = ConvexHull(points)
hull.convex_hull() # ordered hull vertices, [[x, y], ...]
hull.get_indexes() # -> [1, 3, 6, 7, 0] (indices into `points`)
plot_convex_hull(hull)
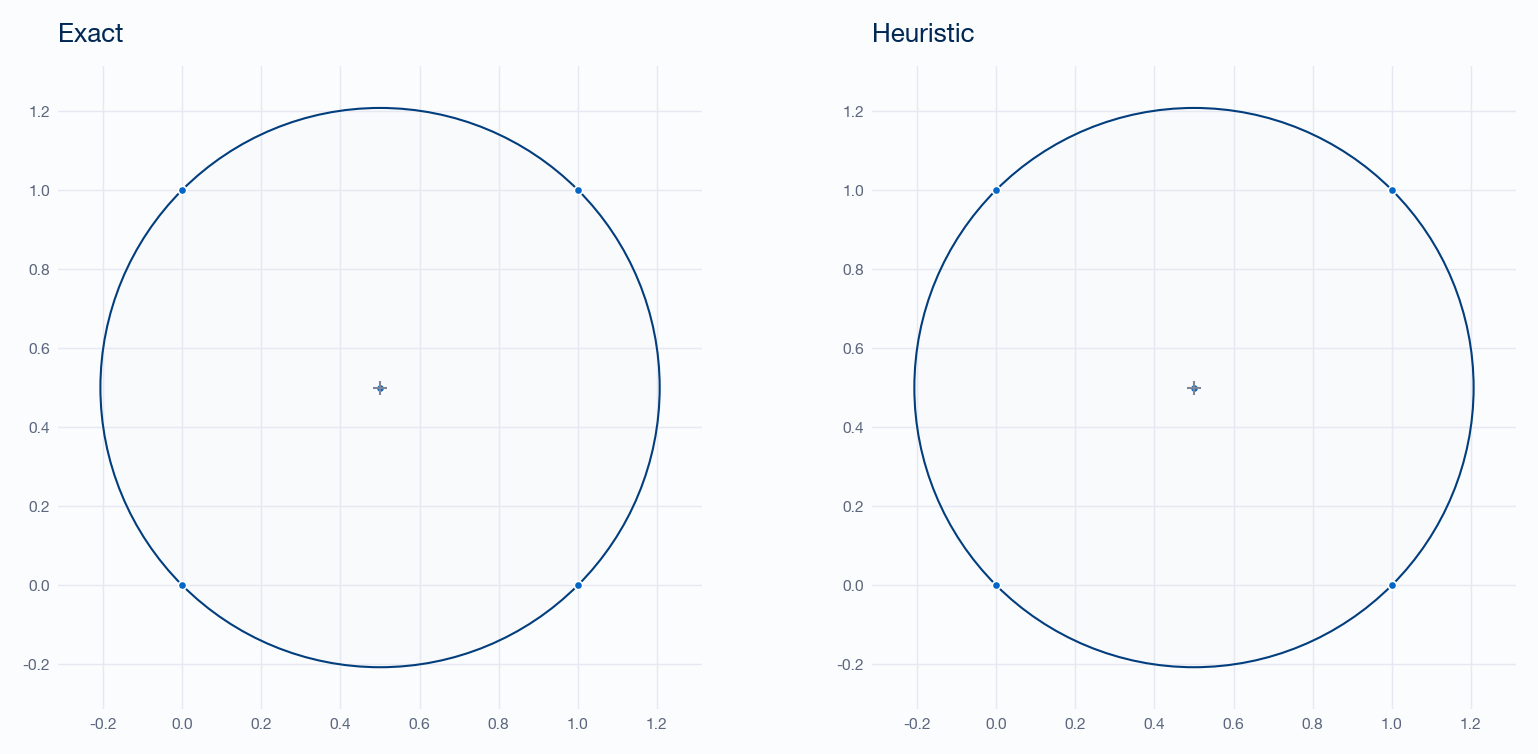
Minimum enclosing circle¶
The smallest circle that contains every point.
import numpy as np
from cgeom import Circle
from cgeom.algorithms import MinimumCircle
from cgeom.visualization import plot_min_circle
points = [(0, 0), (1, 0), (0, 1), (1, 1), (0.5, 0.5)]
mc = MinimumCircle()
center, radius = mc.minimum_circle(points) # -> [0.5, 0.5], 0.70710678...
# the raw [[cx, cy], radius] result drops straight into a Circle primitive
circle = Circle(mc.minimum_circle(points))
circle.area # 1.5707...
plot_min_circle(mc, np.array(points))
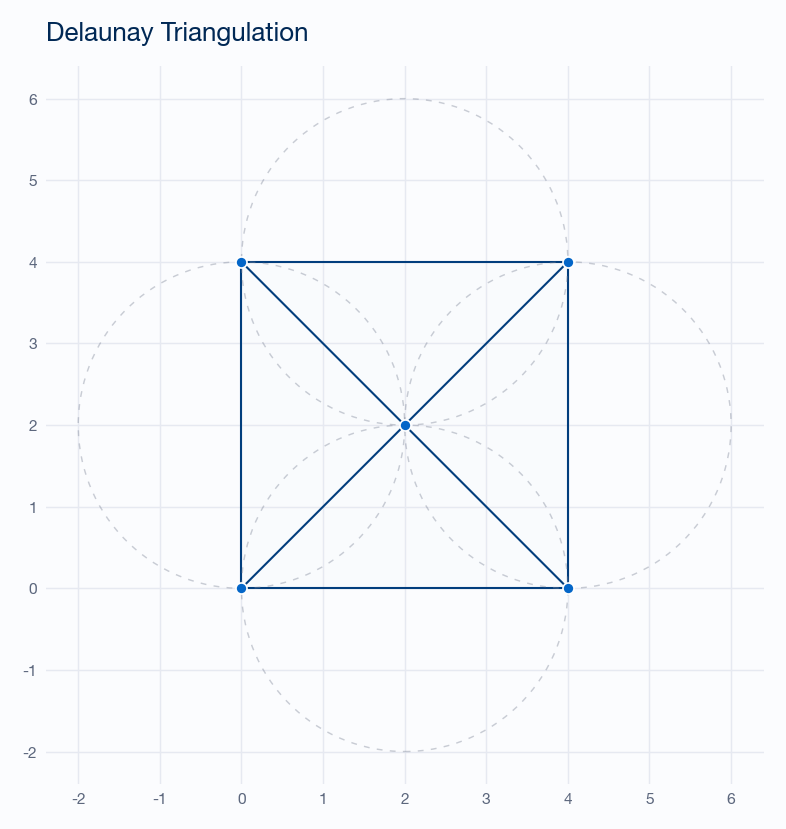
Delaunay triangulation¶
A triangulation that maximizes the minimum angle — no point lies inside any triangle’s circumcircle.
from cgeom.algorithms import DelaunayTriangulation
from cgeom.visualization import plot_delaunay
points = [(0, 0), (4, 0), (4, 4), (0, 4), (2, 2)]
dt = DelaunayTriangulation(points)
dt.triangulate() # -> [[0, 1, 4], [0, 3, 4], [1, 2, 4], [2, 3, 4]]
len(dt.get_edges()) # -> 8
len(dt.get_circumcircles()) # -> 4
plot_delaunay(dt, show_circumcircles=True)
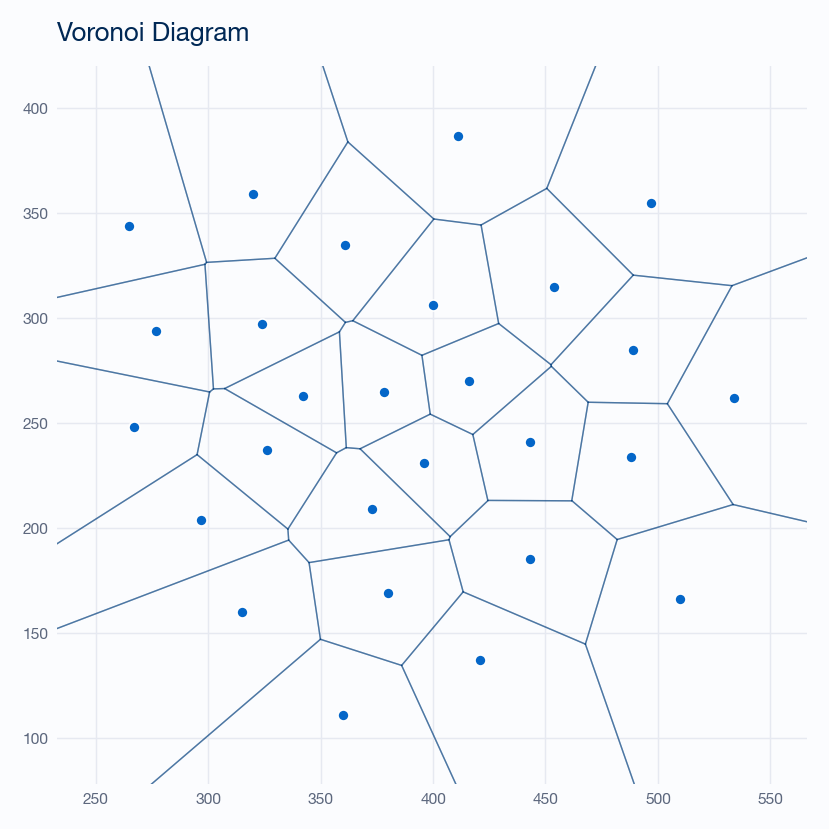
Voronoi diagram¶
Partitions the plane into cells, one per site, containing everything closest to that site — the dual of the Delaunay triangulation.
import numpy as np
from cgeom.algorithms import VoronoiDiagram
from cgeom.visualization import plot_voronoi
points = np.loadtxt("examples/points1.txt") # 27 sites
voronoi = VoronoiDiagram(points)
cells = voronoi.build_voronoi_diagram() # one cell per site
len(cells) # -> 27
plot_voronoi(voronoi, cells)
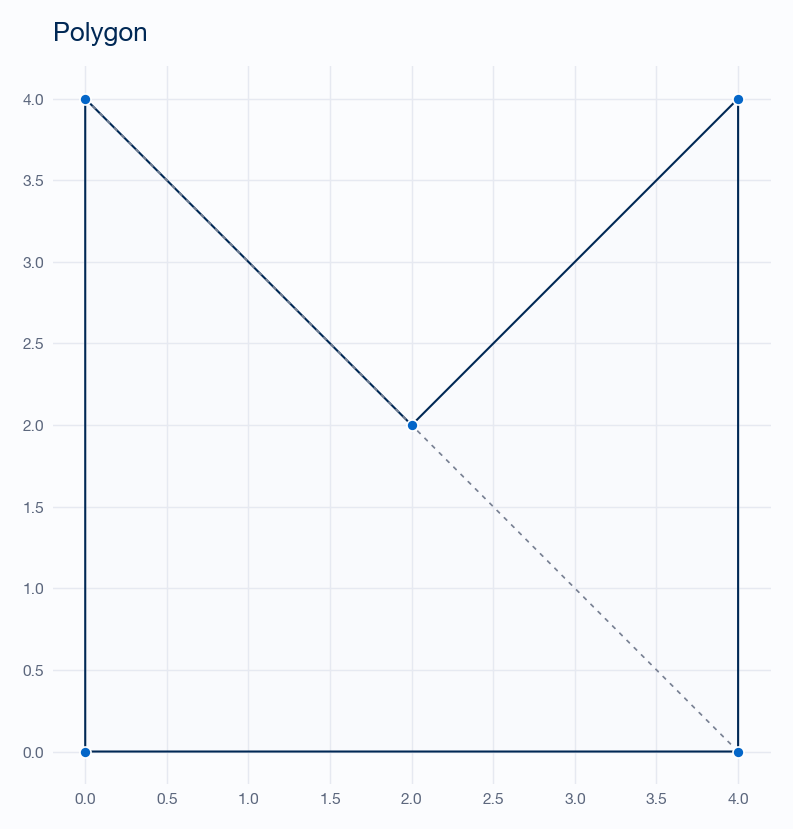
Polygon triangulation¶
Decomposes a simple polygon into triangles by ear clipping. The polygon is triangulated on construction; the diagonals are available immediately.
from cgeom.algorithms import PolygonTriangulation
from cgeom.visualization import plot_triangulation
# a non-convex pentagon, vertices counter-clockwise
poly = [[0, 0], [4, 0], [4, 4], [2, 2], [0, 4]]
pt = PolygonTriangulation(poly)
pt.diagonals # the added diagonals, [[[x1, y1], [x2, y2]], ...]
pt.get_diag_vertexes() # -> [[4, 1], [1, 3]] (vertex-index pairs)
plot_triangulation(pt)
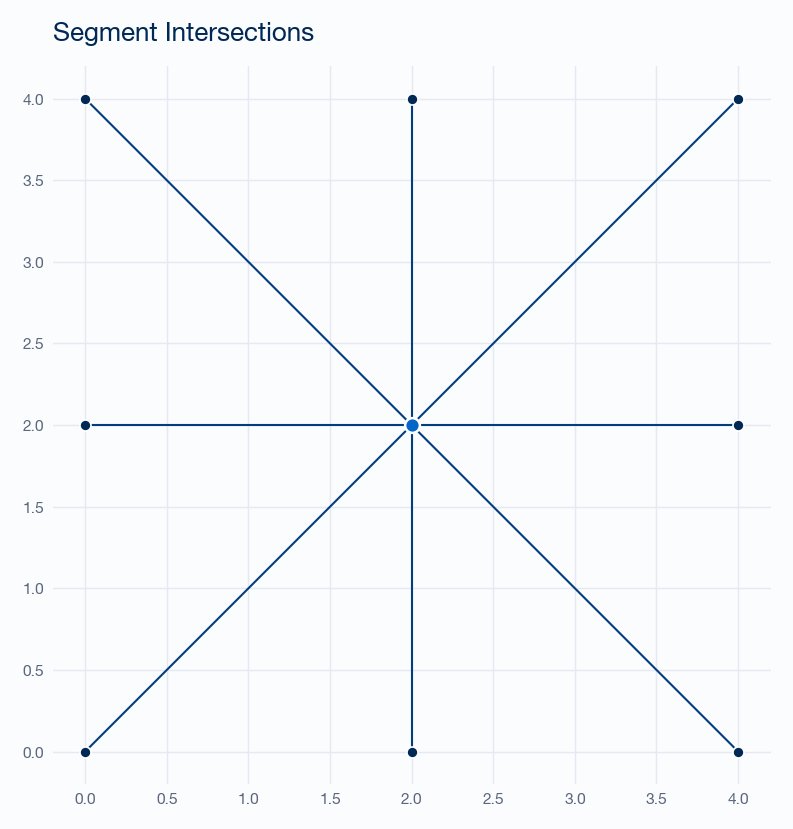
Segment intersection¶
Reports every pairwise crossing of a set of segments using the Bentley–Ottmann sweep line, with a brute-force method for verification.
from cgeom.algorithms import SegmentIntersection
from cgeom.visualization import plot_intersections
segments = [
[[0, 0], [4, 4]], # diagonal /
[[0, 4], [4, 0]], # diagonal \
[[0, 2], [4, 2]], # horizontal
[[2, 0], [2, 4]], # vertical
]
si = SegmentIntersection(segments)
si.find_intersections() # sweep line -> [[2.0, 2.0]]
si.find_intersections_brute_force() # cross-check -> [[2.0, 2.0]]
si.get_intersection_pairs() # (i, j, point) for each crossing pair
plot_intersections(si)
See the User guide for the full method-by-method reference,
or the API reference for complete signatures. The figures above are
regenerated by docs/generate_example_figures.py.