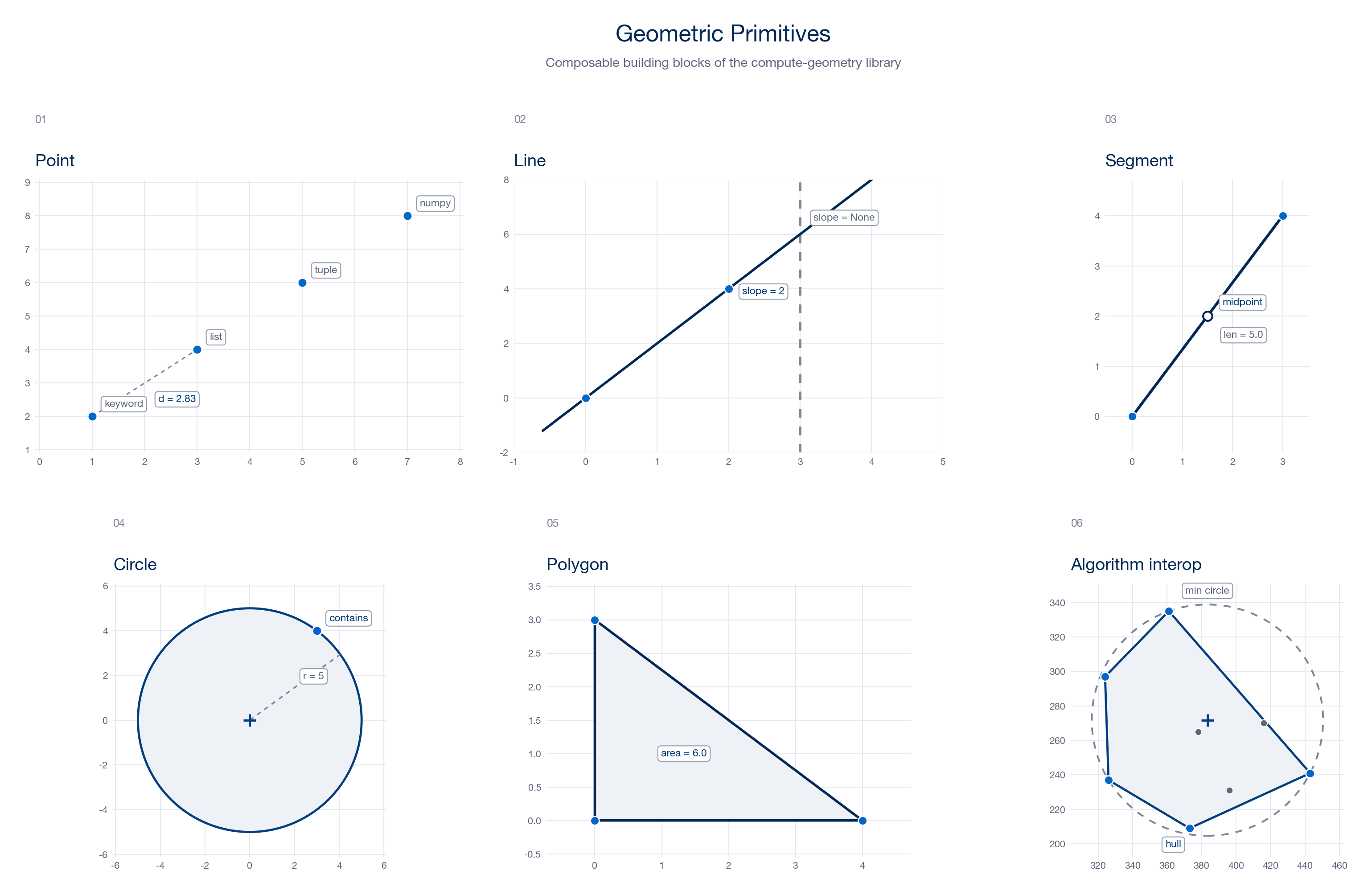
Elements¶
Geometric primitives are the building blocks of the library. They are immutable Pydantic models, so they validate their inputs on construction and are hashable and safe to share.
All primitives are re-exported from the top-level package:
from cgeom import Point, Line, Segment, Circle, Polygon
Point¶
A 2D point with x and y coordinates. It accepts keyword arguments, a list, a
tuple, or a NumPy array, and supports destructuring and indexing.
import numpy as np
p1 = Point(x=1.0, y=2.0)
p2 = Point([3, 4])
p3 = Point(np.array([7, 8]))
x, y = p1 # destructuring
p1[0], p1[1] # indexing
p1.distance_to(p2) # Euclidean distance
p3.to_numpy() # -> np.ndarray([7., 8.])
p3.to_list() # -> [7.0, 8.0]
Coordinates must be finite — NaN or inf raises a validation error.
Line¶
An infinite line defined by two points. Exposes slope, y_intercept, the
implicit coefficients (a, b, c), and a contains_point test. Vertical lines
report slope and y_intercept as None.
line = Line([[0, 0], [2, 4]])
line.slope # 2.0
line.y_intercept # 0.0
line.coefficients # (a, b, c)
line.contains_point(Point(1, 2)) # True
vertical = Line([[3, 0], [3, 5]])
vertical.slope # None
Segment¶
A finite line segment between two endpoints. Exposes length and midpoint.
seg = Segment([[0, 0], [3, 4]])
seg.length # 5.0
seg.midpoint # Point(x=1.5, y=2.0)
seg.to_list() # [[0, 0], [3, 4]]
Circle¶
A circle defined by a center Point and a radius. Exposes area,
circumference, and contains_point.
c1 = Circle(center=Point(0, 0), radius=5.0)
c1.area # 78.54...
c1.circumference
c1.contains_point(Point(3, 4)) # True (on the boundary)
c2 = Circle([[1, 2], 3]) # from [[cx, cy], r]
Polygon¶
A polygon defined by an ordered list of vertices. Exposes area, perimeter,
and num_vertices, and is iterable.
triangle = Polygon([[0, 0], [4, 0], [0, 3]])
triangle.area # 6.0
triangle.perimeter # 12.0
triangle.num_vertices # 3
for vertex in triangle:
print(vertex)
triangle.to_numpy()
Interoperability with algorithms¶
Algorithm outputs map cleanly back onto primitives:
from cgeom.algorithms import MinimumCircle, ConvexHull
# MinimumCircle returns [[cx, cy], radius] -> Circle
mc = MinimumCircle()
circle = Circle(mc.minimum_circle([(0, 0), (1, 0), (0, 1), (1, 1)]))
# ConvexHull returns [[x, y], ...] -> Polygon
ch = ConvexHull([(326, 237), (373, 209), (378, 265), (443, 241)])
hull_polygon = Polygon(ch.convex_hull())
See the API reference for full signatures.